SLAMTEC Mapper is a new type of laser sensor introduced by SLAMTEC, which is different from traditional LIDAR. It has built-in functions of simultaneous localization and mapping (SLAM), and is suitable for many applications such as robot navigation and positioning, environmental mapping and hand-held measurement.
SLAMTEC Mapper uses high-performance SLAM map optimization engine and SharpEdge TM fine mapping technology, which can actively detect and correct closed-loop, and achieve 100,000 square meters high-precision map and pose. SLAMTEC Mapper can work without additional sensors or data input. Because of the built-in 9-DOF inertial navigation system, SLAMTEC Mapper in the hand- held mapping mode can work normally in fluctuating environment with inclination, to ensure the best map data quality.
SLAMTEC Mapper provides a complete SDK development kit, mobile phone and PC-side evaluation tools to facilitate users to expand development and data acquisition. At the same time, combined with the supporting ROS driver, the generated map and pose data can be directly used in the ROS environment, which is fully compatible. SLAMTEC Mapper can be directly used as a LIDAR sensor in addition to its own mapping and positioning functions. Through SDK or ROS node, the LIDAR data can be quickly accessed to users' existing systems.
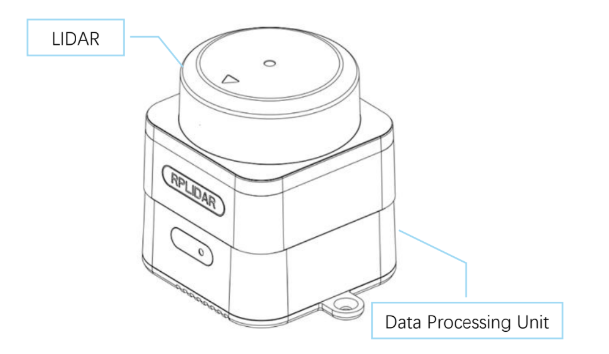
System Composition and Connection
SLAMTEC Mapper kit includes LIDAR sensors and data processing units. Users only need to connect to 5V DC power supply, then with Ethernet or WiFi SLAMTEC Mapper can be easily communicated. SLAMTEC Mapper kit supports DC power supply for DC sockets. Users can obtain real-time map and pose data generated by SLAMTEC Mapper through WiFi signal, and can also realize high-speed and stable data path through
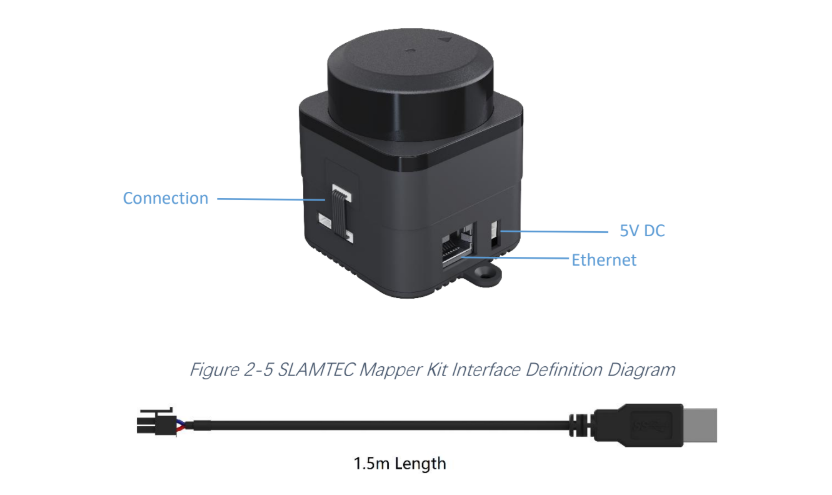
Ethernet Interface
Communication Interface
SLAMTEC Mapper uses a separate 5V DC power supply. Through simple plug- and-play functions, users can connect it to mobile devices such as mobile phones to create an integrated portable measurement scheme. Specific interface definitions and ontology lines are shown in the following figure:
Power Supply Interface
SLAMATEC Mapper kit supports DC socket DC power supply. External power supply needs to ensure that the current output ability and ripple characteristics of the power supply meet the requirements of the table below to ensure the normal use of the map sensor.
Technical Specifications
Item
Detail
Parameter
Distance Range
The largest distance measured by Lidar
40m
Sample Rate
Laser points sampled per second by Lidar
10,000 Hz
Maximum Area
Maximum Mapping Area
300m * 300m
Mapping Resolution2
0.05m
Maximum Moving Speed
Maximum Linear Speed of Product Mobility
2 m/s
Maximum Rotation Speed
Maximum angular velocity of product rotation
TBD
Accuracy
< 0.02m3
Graph Optimizing Working Time4
About 1 hr
Maximum Inclination Angle
Maximum Inclination Angle in Mapping Process
±3°
Frequency of Data Refresh
Frequency of data and location updates information updates