ROS (Robot Operation System) is an open-source operating system that includes a collection of software libraries and tools for robot design. It provides the services expected of an operating system, including hardware abstraction, bottom layer device control, implementation of common functions, message transfering between processes, and package management. ROS simplifies robot design and is the mainstream robot software framework in the world.
Support I2C Slave Mode Control
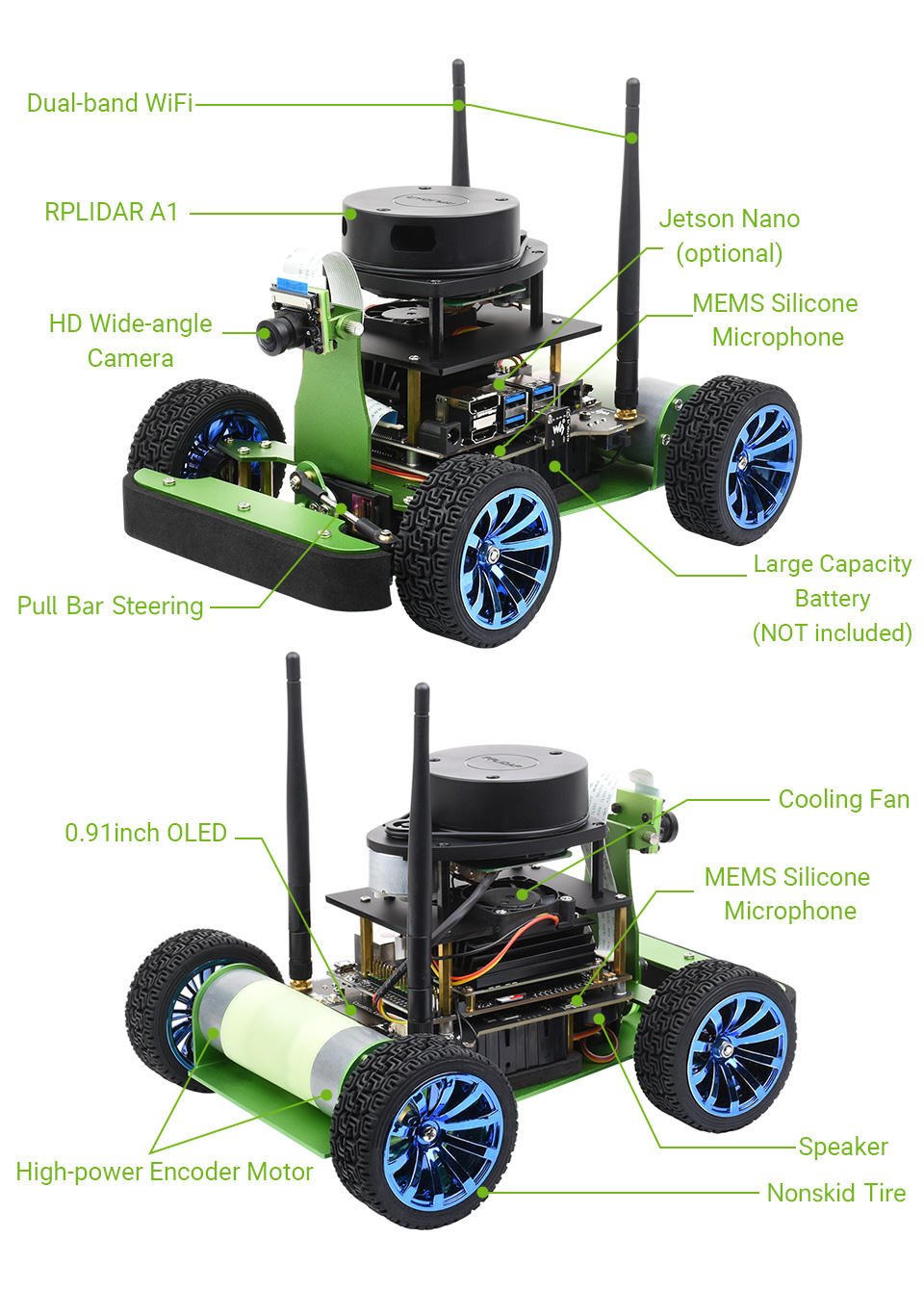
Jetracer ROS Al Kit is an autonomous Al racing car powered by N-VIDIA Jetson Nano. By interactive programming via web browser, it allows high frame rate processing due torch2trt (PyTorch to TensorRT translator) optimizing, so that faster autonomous line following driving can be easily achieved.
Note : This kit comes without Jetson Nano
Technical Specifications
Model/Type
JETRACER ROS
MICROCONTROLLER
RP2040
INTELLIGENT SPEECH
One Speaker Dual Microphones Support Intelligent speech
SENSOR
IMU Sensor RPLIDAR A1
MAPPING NAVIGATION
Support
CAMERA
8MP HD resolution, 160° FOV wide angle camera
OLED
0.91" 128×32 pixels
WIRELESS
AC8265 wireless NIC, 2.4G/5G dual-band WiFi, Bluetooth 4.2
DRIVING TYPE
Ackerman steering Dual gearmotor rear wheel drive
SHOCK ABSORBER
N/A
POWER SUPPLY
12.6V, 18650 battery × 3 ( Not Included)
MOTOR
37-520 Metal Encoder Motor Reduction Rate 1:30 Idle Speed 333RPM
MOTOR ENCODER
AB phase Hall encoder
SERVO
9kg/cm torque
CHASSIS
Aluminum alloy chassis
CRASHPROOF
Front sponge
PROGRAM LIBRARY
JetRacer, DonkeyCar, ROS
SUGGESTION
ROS series Entry level Experienced programming skill required